- Home
- Symmetry Blog
- Understanding the Top 3 Ultrawideband (UWB) Localization Methods
Understanding the Top 3 Ultrawideband (UWB) Localization Methods

About Ray Pan
Ultrawideband (UWB) is an IEEE 802.15.4a/z standard technology that enables the localization in centimeter accuracy by measuring the time-of-flight (ToF) of the radio signal traveling between UWB nodes. An UWB-enabled localization system includes a mobile device, referred to as a “tag”, and one or more UWB nodes that are placed in fixed reference points throughout the area, known as an “anchor”. UWB devices can be configured to act as a tag, anchor, or both depending on the use case. From the relative position between UWB nodes, the absolute location of a “tag” can be calculated in different ways. The most common localization topologies include:
- TWR – Two Way Ranging
- TDoA – Time Difference of Arrival
- PDoA – Phase Difference of Arrival
Ultrawideband TWR Technique
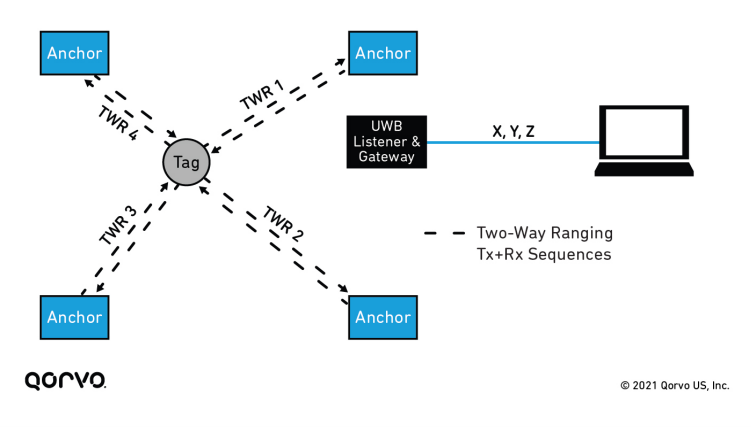
In TWR (Figure 1), the tag measures the “round trip” ToF of UWB radio signals between itself and the anchor, then multiplies it by the speed of light to determine the “distance” between them. The tag initiates a “poll” message to broadcast itself to a known anchor; the anchor replies with a “response” message with a timestamp recording the receiving time of the “poll” message. After receiving the “response”, the tag determines the time required for a round trip to calculate the “distance”. A final message can be generated on the tag end to pass the calculated result to an anchor depending on application requirements. By acquiring “distances” between the tag and three or more anchors in known locations, the absolute position of the tag can be calculated by means of trilateration. During the TWR process, the tag and anchor can only participate in one ranging session at a time at a given time slot. The absolute position would take several sessions of two-way communication to complete, as explained above.
UWB TDoA Ranging
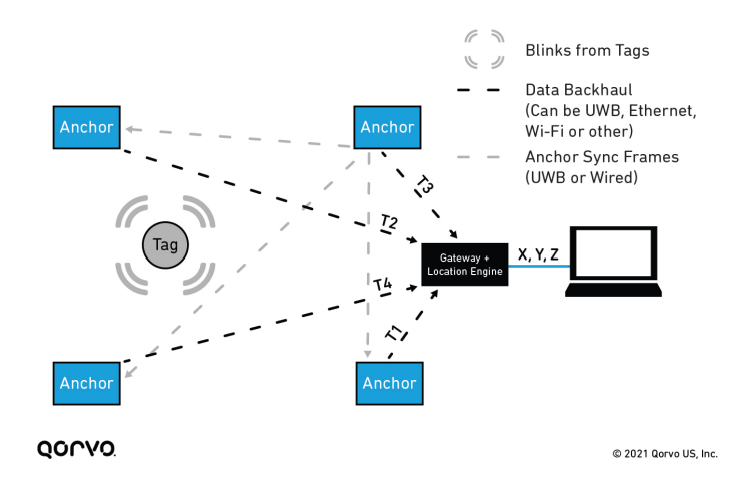
TDoA (Figure 2) localization is based on the time difference of arrival. The basic concept behind TDoA is that the tag broadcasts a “blink” message that is timestamped once received by surrounding anchors. The anchors then forward the message to a central location engine that runs a multilateration algorithm to calculate the position based on the time difference of arrival from the anchors that received the message. Since TDoA is based on the time difference of arrival at each anchor, the anchors involved in this process need to be time synchronized to have precise timing capabilities to accurately measure the time difference between signal arrivals. The process can be reversed to have anchors transmitting “blink” signals and tags recording the time difference of arrival to then determine the position through multilateration algorithms. This approach is similar to how GPS functions.
Ultrawideband PDoA Calculation
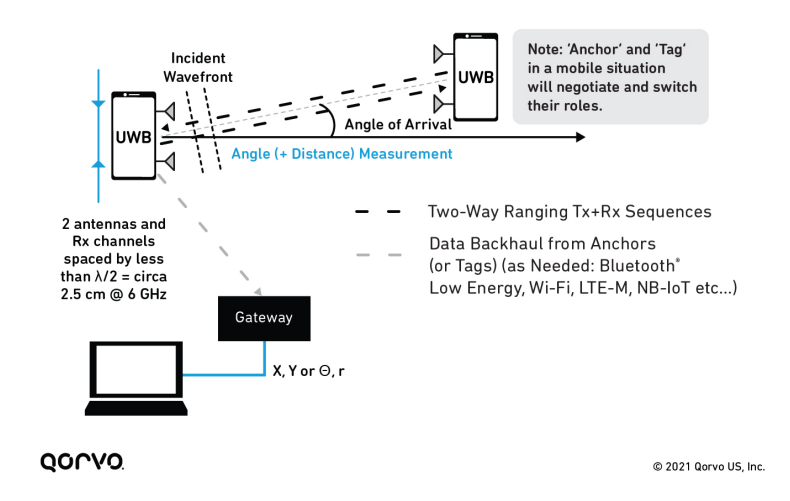
PDoA (Figure 3), is another method used in UWB localization technology to determine the relative position of two UWB devices without any other infrastructure support. One of the devices must feature a minimum of two antennas, so when it receives the signal from the other device, it can measure the phase difference of arrival between the two antennas. With known separation between two antennas, angle of arrival (AoA) can be calculated. The TWR is also carried out in this method to provide “distance” info for the relative position of two devices.
Which UWB Localization Method Should You Choose?
The selection of an UWB localization method mainly depends on the use case of the technology. TWR is the most straightforward implementation, utilizing two-way communication between two nodes to determine their distance and location with additional nodes. It requires minimum to no infrastructure support, and the location engine can run from either side: tag or anchor, making it suitable for security, access control, or general-purpose real-time location systems. Due to the nature of two-way communications and counting the number of message exchanges required to determine the tag position, there are concerns of maintaining battery life (of a tag) and the scalability needed to support large tag density using the TWR method. TDoA doesn’t require two-way communications, making it an ideal option for asset or people tracking in large scale deployments and where extended battery life is preferred. However, as mentioned above, the precision clock tracking mechanism must be implemented for time synchronization of anchors and data backhaul (Wi-Fi or Ethernet) is required for anchors to access the central location engine (which can reside in a master anchor, server, or cloud). The infrastructure support needed for TDoA is rather complex compared to TWR. PDoA is the optimal option for peer-to-peer tracking as it can provide relative position between two devices, such as “find me” applications, access control, drone, and robotics. In addition to the use case, the required accuracy, complexity of deployments, and overall cost should be factored in when considering which UWB localization method to use.