- Home
- Symmetry Blog
- From Trinamic: Internet of [Moving] Things: TMC5130 + Raspberry Pi 3B+
From Trinamic: Internet of [Moving] Things: TMC5130 + Raspberry Pi 3B+

About Symmetry Electronics
Established in 1998, Symmetry Electronics, a Division of Braemac, is a global distributor of electronic components and systems. Combining premier components and comprehensive value-added services with an expert in-house engineering team, Symmetry supports engineers in the design, development, and deployment of a broad range of connected technologies.
Exponential Technology Group Member
Acquired by Berkshire Hathaway company TTI, Inc. in 2017, Symmetry Electronics is a proud Exponential Technology Group (XTG) member. A collection of specialty semiconductor distributors and engineering design firms, XTG stands alongside industry leaders TTI Inc., Mouser Electronics, and Sager Electronics. Together, we provide a united global supply chain solution with the shared mission of simplifying engineering, offering affordable technologies, and assisting engineers in accelerating time to market. For more information about XTG, visit www.xponentialgroup.com.
Let’s say we’re working together in a shared office space where you can rent some desk for a certain time. For your convenience, the tables can be adjusted in height. What if the system already learned your preferred settings for standing and sitting and automatically adjusts as you wish as soon as you walk up to the table? Slight correction? Just grab your phone and make some finer adjustments.
This tutorial shall give a simple starter project for web-accessible motion applications. We’re working on a Raspberry Pi 3B+ with Raspian installed in combination with a TMC5130-BOB stepper driver breakout board. The basic principle will be the same for different drivers. The driver strength of this particular chip is probably too small for the shown application but it’s perfect for a first test on the desk.
The TMC5130 is a stepper motor driver with integrated motion controller, also called a cDriver™ . Therefore, it’s absolutely sufficient to command motions. The movement itself will not require any processing power from the Raspberry Pi, while the motor moves smoothly with outstanding performance.
Below you can find the 10 steps to take. It might be that some of them are already done in your case or you know a better way of doing it. Please feel free to share your wisdom
1. Set up Network & Interfacing
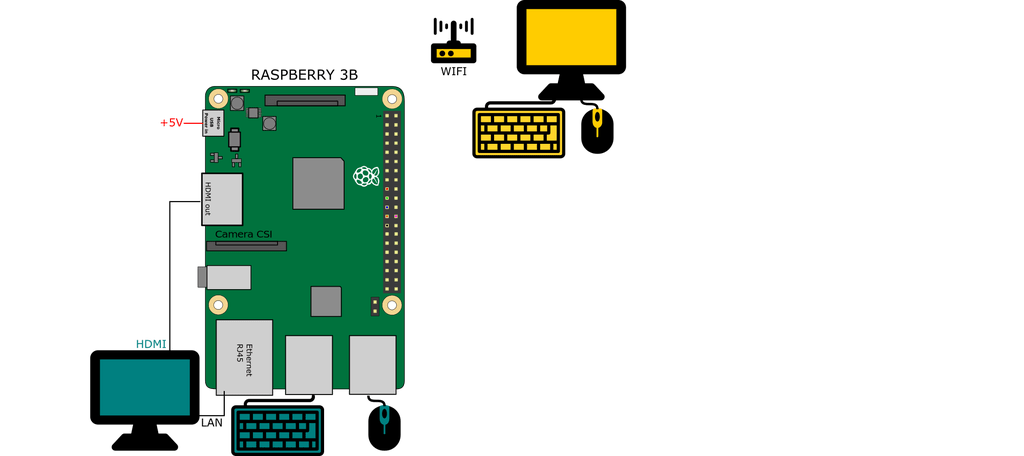
First we connect keyboard, mouse & display to Raspberry Pi and connect it to a network via wifi or cable. In the following steps we assume that the Raspi has access to the internet.
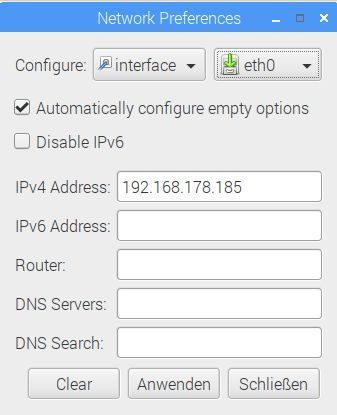
Now we should set static IP addresses for networks in order to access the Raspberry via networks & sub networks. In this tutorial, we use the following:
WIFI (wifi) http://192.168.178.184/ 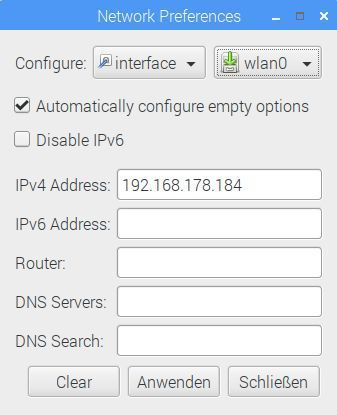
LAN (eth0) http://192.168.178.185/
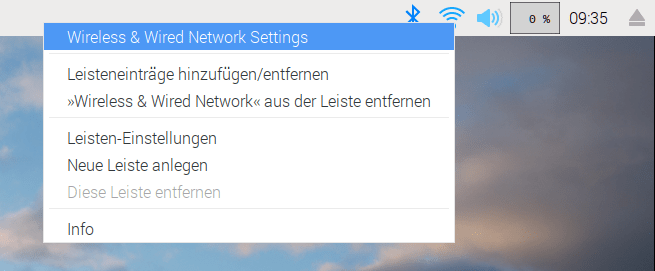
Now we can make the Raspi accessible through your favorite machine. Therefore we open the configuration on the console:
About Symmetry Electronics
Established in 1998, Symmetry Electronics, a Division of Braemac, is a global distributor of electronic components and systems. Combining premier components and comprehensive value-added services with an expert in-house engineering team, Symmetry supports engineers in the design, development, and deployment of a broad range of connected technologies.
Exponential Technology Group Member
Acquired by Berkshire Hathaway company TTI, Inc. in 2017, Symmetry Electronics is a proud Exponential Technology Group (XTG) member. A collection of specialty semiconductor distributors and engineering design firms, XTG stands alongside industry leaders TTI Inc., Mouser Electronics, and Sager Electronics. Together, we provide a united global supply chain solution with the shared mission of simplifying engineering, offering affordable technologies, and assisting engineers in accelerating time to market. For more information about XTG, visit www.xponentialgroup.com.