- Home
- Symmetry Blog
- How to drive a stepper motor closed loop
From Trinamic: How to drive a stepper motor closed loop with your Arduino Uno using a TMC4361A-EVAL + TMC2130-EVAL

About Symmetry Electronics
Established in 1998, Symmetry Electronics, a Division of Braemac, is a global distributor of electronic components and systems. Combining premier components and comprehensive value-added services with an expert in-house engineering team, Symmetry supports engineers in the design, development, and deployment of a broad range of connected technologies.
Exponential Technology Group Member
Acquired by Berkshire Hathaway company TTI, Inc. in 2017, Symmetry Electronics is a proud Exponential Technology Group (XTG) member. A collection of specialty semiconductor distributors and engineering design firms, XTG stands alongside industry leaders TTI Inc., Mouser Electronics, and Sager Electronics. Together, we provide a united global supply chain solution with the shared mission of simplifying engineering, offering affordable technologies, and assisting engineers in accelerating time to market. For more information about XTG, visit www.xponentialgroup.com.
Today we will wire up a TMC4361A-EVAL + TMC2130-EVAL combination to drive a stepper motor closed loop with an Arduino Uno. The encoder used for this test has a resolution of 10.000 cpr respective a resolution of 40.000.
Preparation
For this tutorial the Eselsbruecke got a soldered connection between +5V_USB (pin 5) to +5V_VM (pin 42) to get +5V for the encoder. You can use jumper wires as well but make sure the connection is properly.
Wiring
The wiring is very simple. You will need 9 jumper wires. To make the wiring more easy you can print out the TMC5130-EVAL_Pinning.pdf (used from a previous blog entry) and cut out the template to mount it on the connector header of the TMC4361-EVAL (As seen on illustration 4). As a reference you can use the TMC5130-Eval_v15_01_Schematic.pdf. Here you’ll find the signals that are on each pin. The configuration is documented in the comment section of the Arduino code.
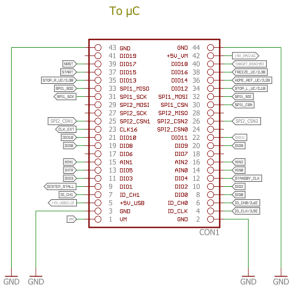 Illustration 3 – Pinheader of TMC4361-EVAL
Illustration 3 – Pinheader of TMC4361-EVAL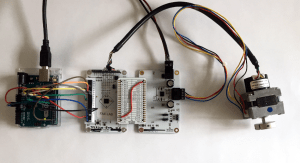 Illustration 4 – TMC4361A+TMC2130 wired up with Arduino Uno
Illustration 4 – TMC4361A+TMC2130 wired up with Arduino UnoCable colors of illustration 4
GND –> blue
SDO –> yellow
SDI –> orange
SCK –> white
CSN –> grey
DIO0 (DRV_ENN) –> black (Is passed thru to TMC2130-EVAL DRV_ENN pin)
DIO16 (NFREEZE) –> brown
CLK16 –> green
Arduino Code
The Arduino Code below does not need any additional libraries. The SPI library comes with the Arduino IDE. The program initializes the TMC2130 thru the TMC4361A-EVAL (cover datagram) and the TMC4361 itself. It will rotate a 200 full step motor 2 revolutions to the one and 2 revolutions to the other direction depending on the wiring of the stepper motor. Please use either the TMC4361 and TMC2130 datasheets as a reference for the different registers (Download links here).
Download
The Arduino_TMC4361_TMC2130 zip file includes the pinning template, the TMC4361-EVAL schematic and the Arduino project.
Related Pages
- TMC4361A-LA
- TMC2130
- TMC2130 datasheet download
- TMC2130-EVAL
Contact Symmetry Electronics at 866-506-8829, email us or start a live chat and we'll be glad to help you with your projects!
About Symmetry Electronics
Established in 1998, Symmetry Electronics, a Division of Braemac, is a global distributor of electronic components and systems. Combining premier components and comprehensive value-added services with an expert in-house engineering team, Symmetry supports engineers in the design, development, and deployment of a broad range of connected technologies.
Exponential Technology Group Member
Acquired by Berkshire Hathaway company TTI, Inc. in 2017, Symmetry Electronics is a proud Exponential Technology Group (XTG) member. A collection of specialty semiconductor distributors and engineering design firms, XTG stands alongside industry leaders TTI Inc., Mouser Electronics, and Sager Electronics. Together, we provide a united global supply chain solution with the shared mission of simplifying engineering, offering affordable technologies, and assisting engineers in accelerating time to market. For more information about XTG, visit www.xponentialgroup.com.