- Home
- Symmetry Blog
- Qorvo Common UWB Topologies/Architectures | Symmetry Blog
Qorvo Common UWB Topologies/Architectures | Symmetry Blog

About Tyler Wojciechowicz
Tyler Wojciechowicz is an Applications Engineer at Symmetry Electronics. He has his Bachelor’s in Electrical Engineering from Milwaukee School of Engineering and eight years of hands-on experience as an Electrical Engineer. He specializes in IoT applications, microcontrollers, embedded programming, timing, sensors, and power management. In his current role, he works closely with field sales to advise on optimal part substitutions, product suggestions, and sales tools. He is adept in developing instruction manuals, reference designs, tutorials, product comparison matrices, and marketing campaigns for reputable suppliers across multiple markets.
Flexible UWB Use-Case Implementation
- Infrastructure-Based (high accuracy location/navigation)
- Point to Point (secure bubble)
- No Infrastructure (mesh network)
- Reduced/Mobile Infrastructure (nomad location/navigation)
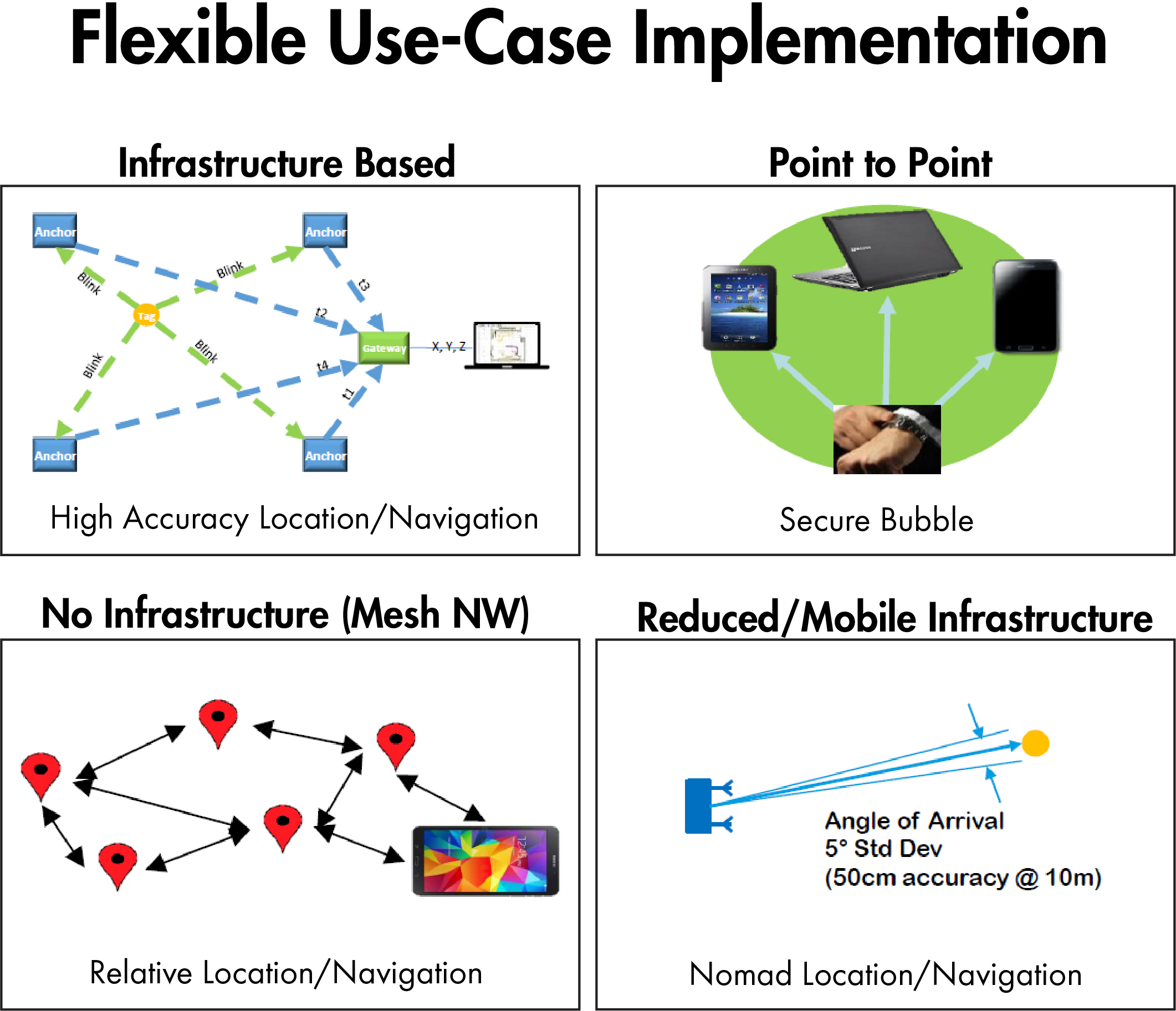 Figure 1: Flexible UWB Use-Case Implementation. Source: Qorvo
Figure 1: Flexible UWB Use-Case Implementation. Source: QorvoUltra-Wideband Ranging Techniques
- Two Way Ranging (TWR): Round-trip Time of Flight (ToF) measurements are determined through the exchange of messages between radio transceivers. For 2D, TWR requires three fixed anchors (four for 3D location tracking), a software location engine, and at least one mobile tag. The tag(s) then measure the round-trip ToF to each anchor, which results in the consumption of airtime and battery life.
- Time Difference of Arrival (TDoA): Requires four anchors that are all connected via a wired LAN network, software location engine, and at least one mobile tag. Through a “blinking” method, the tag(s) communicate with the anchors to allow them to calculate their position. Through this method, the exchange of ranging messages is not necessary (as long as the anchors are synchronized)–thus reducing the amount of channel airtime that would normally be required for TWR, which also significantly improves battery life.
- Phase Difference of Arrival (PDoA): Allows a single anchor with two antennas to determine the range and location relative to a tag. Bearing information is extracted from the signals arriving at each of the anchor’s two (or more) antennas.
Interested in integrating Qorvo products into your design? Our Applications Engineers offer FREE technical design consulting. Please contact us for more information.
About Tyler Wojciechowicz
Tyler Wojciechowicz is an Applications Engineer at Symmetry Electronics. He has his Bachelor’s in Electrical Engineering from Milwaukee School of Engineering and eight years of hands-on experience as an Electrical Engineer. He specializes in IoT applications, microcontrollers, embedded programming, timing, sensors, and power management. In his current role, he works closely with field sales to advise on optimal part substitutions, product suggestions, and sales tools. He is adept in developing instruction manuals, reference designs, tutorials, product comparison matrices, and marketing campaigns for reputable suppliers across multiple markets.